虚拟化内存
#计算机/四大件/操作系统/虚拟化
什么是虚拟化内存?
将物理内存的使用方式抽象化,使每个运行的程序都感觉自己拥有独立的连续内存空间
不同进程之间的地址空间互不影响
早期系统怎么分配地址?
早期的机器没有提供什么抽象给用户,而且一个物理内存中一次只能放入一个进程
![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=RtI0hcqP|780]]
[!question] 那我们怎么解决保护问题呢?我们不希望物理内存之间的进程可以相互读取数据 所以我们给出了物理内存的抽象,地址空间
地址转换
硬件对每次内存访问进行处理,将指令中的虚拟地址转换为数据实际存储的物理地址
[!hint] 地址空间 一个进程的地址空间包含这个程序的所有内存状态
![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=jzxFcBcn|510]]
作为用户级程序的程序员,可以看到的任何地址都是虚拟地址【如果你在程序中打印出一个地址,那就是一个虚拟的地址】; 只有操作系统,通过精妙的虚拟化内存技术,知道这些指令和数据所在的物理内存的位置;
假设:
- 用户的地址空间必须连续地放在物理内存中
- 假设地址空间不是很大【小于物理内存】
- 每个地址空间的大小都一样
动态重定位————地址转换的第一次革命
在程序运行时,可以改变程序在内存中的位置,所以叫动态重定位
动态重定位的过程
在编写和编译程序时假设地址空间从 0 开始 当程序执行时,操作系统会决定其在物理内存中的实际加载地址的初始位置,并将其记录在基址寄存器中。【能修改寄存器必须是在内核模式下】 在程序运行时,会通过 物理地址 = 虚拟地址 + 基址寄存器地址 来找到实际的物理地址。 界限寄存器会有两种方法来“保护”:
- 在求和前,检测被访问的虚拟地址是否超过虚拟空间总大小
- 在求和后,检测被访问的虚拟地址是否超过虚拟空间总大小 + 基址寄存器地址大小
一旦越界访问,CPU 就会触发异常,进程就可能终止
[!question] 为什么通过硬件,而不是软件?
- 不提供访问保护
- 一旦完成,很难进行二次定位【将内存空间重定位到其他位置】
[!bookinfo]
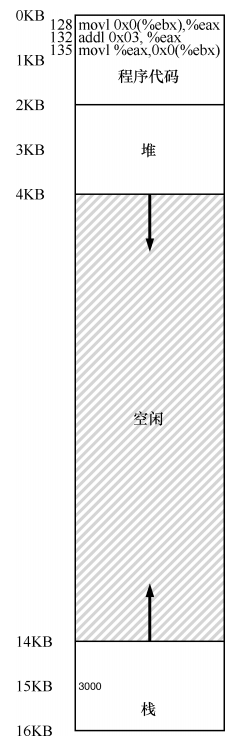 | 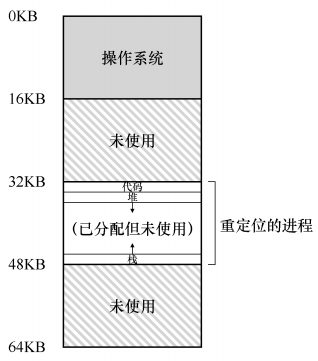 |
| 进程自己世界里的内存模样【以为整个物理内存都是它的】 | 进程实际在物理内存中的模样 |
| 程序计数器首先被设置为 128。当硬件需要获取这条指令时,它先将这个值加上基址寄存器中的 32KB【32768】,得到实际的物理地址 32896,然后硬件从这个物理地址获取指令。接下来,执行该指令时,进程发起从虚拟地址 15KB 的加载,处理器同样将虚拟地址加上基址寄存器中的地址,得到最终的物理地址 47KB,从而获得需要的数据。 |
整体过程
| 操作系统 | 硬件 | CPU |
|---|---|---|
| 启动内核模式,初始化陷阱表 | ||
| 操作系统要求硬件记住:系统调用处理程序;时钟处理程序;非法内存处理程序;非常指令处理程序 | ||
| 开启时钟 | ||
| 时钟开启,每 x 就中断一次 | ||
| 初始化进程表,初始化空闲列表 | ||
| 操作系统初始化结束,运行内核模式 | ||
| 启动进程 A 的准备工作:在进程表中分配条目;为进程分配内存;设置基址,界限寄存器;从陷阱返回【进入进程 A】 | ||
| 切换到用户模式 | 恢复进程 A 的寄存器;跳到 A 的程序计数器 | |
| 进程 A 运行,获取指令 | ||
| 检查是否越界,转换虚拟地址 | ||
| 执行指令 | ||
| 是否需要显示加载/保存【可以重定义】 | ||
| ……,A 继续执行指令 | ||
| 发生时钟中断【切换到进程 B】 | ||
| 操作系统转回内核模式,执行中断处理程序 | ||
| 跳到中断处理程序所在位置 | ||
| 调用 switch() 例程:将寄存器(A)保存到进程结构(A);从进程结构(B)恢复寄存器(B) | ||
| 从陷阱返回【进入进程 B】 | ||
| 切换到用户模式,跳到 B 的程序计数器 | ||
| 进程 B 运行 | ||
| 进程 B 执行了错误的加载 | ||
| 转向内核模式 | ||
| 跳到陷阱处理程序 | ||
| 决定终止进程 B;回收 B 的内存;移除 B 在进程表中的条目 |
动态重定位如何解决三大问题的?
| 解释 | 解决方法 | |
|---|---|---|
| 怎么欺骗进程? | 不要让程序知道内存被虚拟化了,让它认为它拥有自己的私有物理内存 | 通过地址转换 |
| 怎么让效率更高? | 不能让程序运行的更慢;也不能需要太多额外的内存来支持虚拟化 | 利用硬件 |
| 怎么保护进程? | 让一个进程在运行时,只能访问它机子的地址空间里的内容 | 界限寄存器 |
| ### 优缺点 |
- 优点
解决了三大问题
- 缺点
效率低下【由于进程的栈区和堆区并不大,导致这块内存区域中大量的空间被浪费。这种浪费通常称为内部碎片(已经分配的内存单元内部有未使用的空间,造成了浪费)。所以,我们需要更复杂的机制,以便更好地利用物理内存,避免内部碎片。】
分段————地址转换的第二次革命
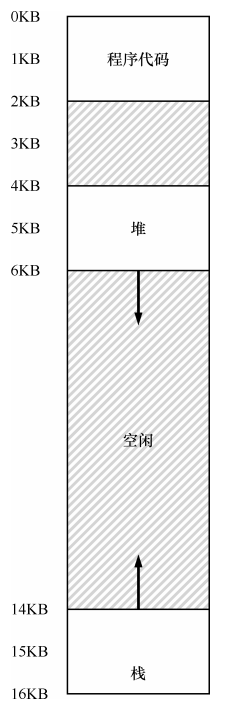
在这个例子里,有 3 个逻辑不同的段:代码、栈、堆。我们给每一段分配一对寄存器【基址寄存器 + 界限寄存器】。
如何知道什么时候要用哪一对寄存器?
- [x] 显式方法:
引入 段寄存器 ![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=6Y6PgUpXxcHrbCvAhQEFU|600]] 段寄存器中的偏移量与基址寄存器相加,硬件就得到了最终的物理内存地址
- [x] 隐式方法:
硬件通过地址产生的方式来确定段【如果地址由程序计数器产生,那么地址在代码段;如果基于栈或基址指针,那么在栈段;其他地址则在堆段】
段错误:在支持分段的机器上发生了非法的内存访问
优缺点
- [x] 优点
- [ ] 可以代码共享,有利于节省内存:
在段寄存器中增加几个位,用于表示这段程序 只读,可执行,可读可写。之后不仅要检查虚拟地址是否越界,还要检查特定访问是否允许
- [ ] 地址转换的开销极小
- [x] 缺点
- [ ] 会产生 外部碎片
解决方案:
重新安排原有的段【操作系统先终止运行的进程,将它们的数据复制到连续的内存区域中去,改变它们的段寄存器中的值,指向新的物理地址,从而得到了足够大的连续空闲空间】 但是,内存紧凑成本很高,一般会占用大量的处理器时间
[[#空闲空间管理]]【最优匹配,最坏匹配,首次匹配,伙伴算法】 无论算法多么精妙,都无法完全消除外部碎片
永远不要分配不同大小的内存块
分页————地址转换的第三次革命
将进程的地址空间划分为固定大小的单元,每个单元称为一页
如何通过分页来实现虚拟化内存?
![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=YlbBv12U|700]] 我们首先要维护 页表【操作系统为每一个进程保存的一个数据结构(倒排页表不是)】,它的作用是记录每个虚拟页在物理内存中对应的位置【例如此处的页表有以下 4 个条目:(虚拟页 0→物理帧 3)、(VP 1→PF 7)、(VP 2→PF 5)、(VP 3→PF 2)】
虚拟地址=虚拟页面号+偏移量 ![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=NyhdJGp4|700]]
页表的位置
![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=Q6jjbvYN|290]]
![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=5pvr5y2J|1000]]
优缺点
- [x] 优点
- [ ] 可以更高效地管理内存【页的大小是固定的】
- [ ] 减少空间碎片化的问题【因为每个页的大小是一致的,不会出现碎片化的情况】
- [ ] 为虚拟内存系统提供了更灵活的管理机制【我们不会假定堆/栈的增长方向,以及它们如何使用】
- [x] 缺点
- [ ] 维护页表需要较大的内存空间
- [ ] 利用页表进行地址转换开销很大【可能使进程减慢 2 倍甚至更多】
TLB 分页————地址转换的第四次革命
空闲空间管理
对于外部碎片问题的空闲空间管理。【例如,用户级的内存分配库【如 malloc() 和 free()】/操作系统用分段的方式实现虚拟化内存】
底层机制
分割与合并
![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=0liEF2j1KrpJoFFcZaXH8|791]]
如何追踪已分配的空间?
[!question] 我们在 free() 时只是给定了一个指针,并没有给定空间的大小,程序是如何知道要 free 多大空间呢? 通过在内存中加入头块 ![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=5gcdSplk|500]] 调用 free(ptr) 时,库会通过简单的指针运算得到头块的位置,获得头块指针,检查幻数是否符合预期,并计算要释放的空间大小【头块大小 + 分配给用户的空间大小】
如何维护一个简单的空闲列表?
![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=kp595uwB|900]]
堆的空间不足怎么办?
大多数传统的分配程序会先分配一个很小的堆,当空间耗尽时,再向操作系统申请更大的堆
基本策略
最优匹配
遍历整个空闲列表,找到所有符合条件的空闲块【大于等于请求的内存空间】,然后返回最小的一块
![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=jtoVfliw]]
- 优点
- 能够最大程度地减少内部碎片的产生
- 缺点
- 需要进行大量的比较操作,这可能导致较高的时间复杂度和性能开销
- 会产生外部碎片
最差匹配
遍历整个空闲列表,找到所有符合条件的空闲块,然后返回最大的一块给用户,分割并满足用户需求后,剩下的再加入空闲列表
![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=24Oe6S2i]]
- 优点
- 可以减少外部碎片【因为它保持了大块内存的连续性】
- 缺点
- 容易产生内部碎片
- 表现很差,开销很高
首次匹配
按顺序查找并将第一个满足大小的空闲块分配给用户,剩下的再加入空闲列表
![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=24Oe6S2i]]
- 优点
- 简单快速【不需要遍历所有空闲块】
- 缺点
- 会产生内部碎片【因为第一个满足大小的空闲块可能很大】
- 会产生外部碎片【随着时间推移,经常发生分配和释放的内存块会留下许多零散的未分配内存空间】
下次匹配
第一个请求时,从起始位置开始查找第一个满足请求大小的空闲内存块; 对于后续的内存请求,算法会从上一次分配的位置继续向后搜索,找到满足需求的第一个空闲内存块,将其分配给用户; 如果在当前位置及其后续位置都没有足够大的空闲内存块,算法会循环回到起始位置重新开始搜索;
- 优点
- 降低了外部碎片【因为他从上一次分配的位置开始搜索,尽量使用连续的内存块】
- 快速分配【不用遍历所有空闲块】
- 缺点
- 会产生内部碎片【可能就算从上一次的结束位置开始分配,空闲块也会很大】
改进内存分配的技术
分离空闲列表 + 厚块分配程序
如果某个应用程序经常申请一种(或几种)大小的内存空间,那就用一个独立的列表,只管理这样大小的对象,其他大小的内存请求都交给更通用的内存分配程序。
- 优点
- 碎片将不再是问题
- 这种特定大小的内存分配和释放会很快【没有复杂的查找过程】
- 能够提高内存管理的效率【因为避免了初始化和销毁数据结构的开销(厚块分配程序尝试保持空闲对象在一个预初始化的状态。这意味着当这些对象被再次需要时,它们就已经处于可用状态,不需要经过初始化过程。可以减少初始化和销毁对象所需的时间和计算资源)】
二分伙伴分配程序
当有一个内存分配请求时,空闲空间被递归地一分为二,知道刚好可以满足请求的大小,再将请求的块返回给用户。 *** 当块被释放时,分配程序会检查“伙伴”块是否空闲。如果空闲,则合二为一,接着继续检查,直到合并整个内存区域 ![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=Lyoa2p8V|320]]
- 优点
- 让合并变得简单
- 缺点
- 会有内部碎片【如上图】
内存操作 API
栈内存:申请和释放操作由编译器来隐式管理的 ![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=Dm3sIqfT|450]] 堆内存:申请和释放操作都由程序员显式地完成【这也导致了很多缺陷】 ![[Excalidraw/计算机/四大件/操作系统 Draw.md#^group=WQQCmjec]]
malloc()
传入要申请的堆内存的大小,失败就返回 NULL,成功就返回一个新申请空间的指针
double* d = (double*)malloc(sizeof(double)); //给双精度浮点数分配空间free()
接收一个参数,释放堆内存
int* x = malloc(10*sizeof(int));
free(x);calloc()
realloc()
brk()
sbrk()
mmap()
即使一个程序正确地运行过一次,也并不意味着它是正确的
进程退出时,是否要进行 free()?
系统存在两级内存管理。 第一级:操作系统在程序运行时将内存交给程序,并在进程结束时将其收回; 第二级:进程在堆或栈进行管理【在 malloc() 和 free() 调用时】
- [ ] 对于短时间运行的程序,即使泄露了内存【在第二级上没有 free()】,操作系统也会在程序结束时收回进程的所有内存
- [ ] 对于长期运行的程序【web 服务器,数据库管理系统】,泄露了内存,由于这些服务不会被关停,所以操作系统也不会回收,这时的内存泄露非常危险